


















驿唐科技高精度北斗/INS陆基精准测量案例
一、北斗/惯性导航
1.简介
惯性导航是高精度北斗应用拓展的重要手段。北斗/惯性组合导航中,北斗导航辅助惯导提高定位、测姿精度,惯性导航辅助北斗缩短定位时间、提高定位精度。两种导航方式优势互补,共同提高精度。惯性辅助下的北斗导航应用将释放巨大空间。
2.优势对比

3. 应用领域
(1)空基
n飞行器自主导航系统
n飞行器自动控制系统
n机载惯性稳控平台
(2)海基
n舰船导航定位系统
n船载武器发射平台
n船载惯性稳定平台
n船载海洋测绘系统
(3)路基
n车辆导航定位系统
n精准农业自动化应用
n驾驶人考试训练
n数字城市地图测绘
n高速铁路轨道检测
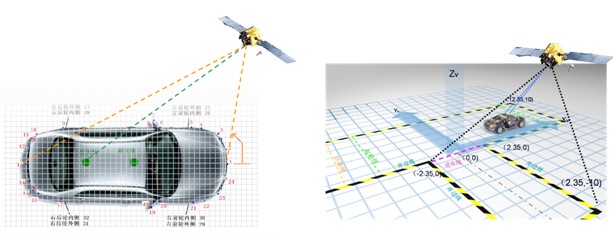
二、驾驶人考试及训练应用
1. 驾考先进技术
在驾考应用中,将北斗高精度定位定向与惯性测姿定向技术完美融合。
2.驾考市场
驾驶人考试及训练应用引领2013年高精度北斗应用创新和产业化推广,已推广至30个省,1000余个驾校,2013年度全国销售30000余台设备。
应用持续深入发展中,市场由驾考科目二到科目三发展,由考试到训考一体化发展。产品形态发展方向为小型、低成本、高可靠性、高精度和高集成度。
3. 驾考问题新领域新挑战
(1)评判公正性à精度再提升,遮挡、转弯à精度需考证
(2)公众质疑、产品精度验证à标准参考系统
(3)应用科目二向科目三转变à复杂路况(遮挡、干扰)
(4)庞大的训练市场à更低成本、更高集成度
(5)智能驾考系统一体化设计
(6)驾考应用案例向其他领域扩展
4. 驾考发展新方向
n惯性导航将体现更大的辅助作用
n多传感器融合将成为主要手段
n北斗/多传感器融合集成化、一体化OEM板卡
三、城市街景测绘应用
1. 城市街景测绘基本原理
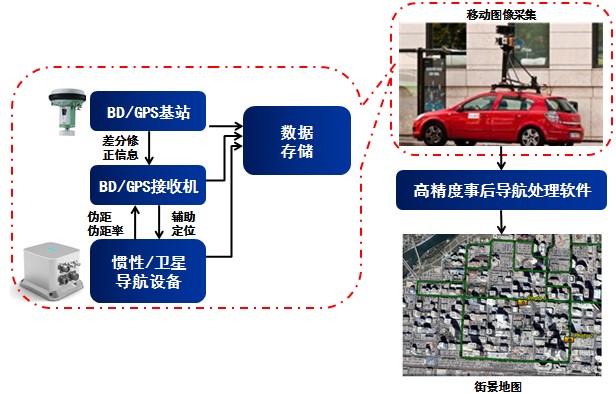
城市街景测绘的前提是测绘仪器的高精度位置、姿态、航向基准,关键部件是高精度北斗/惯性组合导航系统。
2. 城市街景测绘应用挑战
(1)城市测绘由二维到三维转变
(2)测绘需求由一级城市到二、三级城市扩散
(3)由开阔场地向峡谷、遮挡区扩散
(4)测绘物由一般街道向小形建筑深入细化
(5)由静态测量向动态测量转变
(6)精度由米及向亚米级、厘米级发展
3. 高精度北斗/光纤惯性组合导航系统应用于车载式测绘系统
(1)系统产品参数
ü全球覆盖:突破了卫星导航在遮挡地区的使用限制
ü全天候:惯性技术自主性保障恶劣环境下可靠运行
ü高精度:实时差分和事后差分,位置精度达厘米级
ü高可靠性:MTBF>35,000小时
ü多模式:支持单、双天线及纯惯导三种工作模式
ü双模态:支持北斗、GNSS双模态
ü全参数:除卫星导航的位置信息外,还可提供航向、姿态信息
ü后处理:惯性/GNSS组合导航、惯性/里程计组合导航以及POS后处理功能
ü自组合、自标定:在无GPS辅助的情况下,凭借里程计惯性导航的组合可获得2~3‰(行驶里程)的定位精度
(2)北斗/光纤惯性组合产品安装于测试车辆上

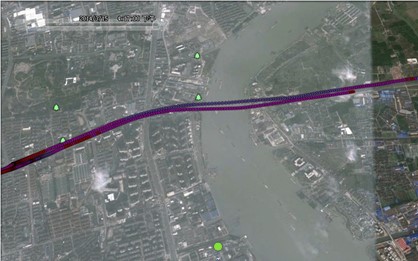
(3)测量结果示例
中关村GPS测量结果

上海高架桥—组合导航测试结果

上海海底隧道--GPS测试结果
4. 高精度北斗/ MEMS惯性组合导航系统应用于便携式测绘系统
(1)系统产品参数
ü全球覆盖:突破了卫星导航在遮挡地区的使用限制
ü全天候:惯性技术自主性保障恶劣环境下可靠运行
ü高精度:实时差分和事后差分,位置精度达厘米级
ü高可靠性:MTBF>35,000小时
ü多模式:支持单、双天线及纯惯导三种工作模式
ü双模态:支持北斗、GNSS双模态
ü全参数:除卫星导航的位置信息外,还可提供航向、姿态信息
(2)测量结果示例
上海高架桥--MEMS组合导航系统测量结果曲线

5. 突破的主要关键技术
n北斗/INS高精度后处理算法
n里程计自动识别、刻度系数自估计、自动组合导航算法
n在多路径干扰环境中的智能识别并隔离精度较差的北斗定位信号
nINS高精度标定技术
四、高铁轨道参数检测
1. 背景和需求
全国高速铁路里程1万公里,居世界第一。铁路营运里程10万公里,居世界第二。里程增加速度提升,负荷增加,形成威胁巨大。对轨道检测的精度要求不断提高,轨道检测效率要求也不断提高。高效率、高精度、便携化铁路轨检系统需求十分迫切。
2. 轨检车两种实现技术
(1)光学检测法
n优点:测量精度较高,可达0.1mm
n缺点:测量效率低、无法实现连续测量、受环境影响
n产品:GEDO、安博格GRP1000、南方高铁SJG
(2)惯性检测法
n优点:可实现快速、连续测量,测量方法简单
n缺点:对惯性器件精度要求较高,成本较高
n产品:瑞士安博格GRP VMS

3. 北斗/惯性轨检车组成
北斗/惯性轨检车主要由四部分组成:北斗卫星接收基站、主车体、位置姿态系统、后处理软件。

4. 北斗/惯性轨检车工作原理
n利用高精度位置姿态系统测得轨道车的运动数据
n通过事后处理软件得到高精度在轨运动参数
n利用先进轨道参数算法得到水平、高低、轨向、轨距等轨道参数
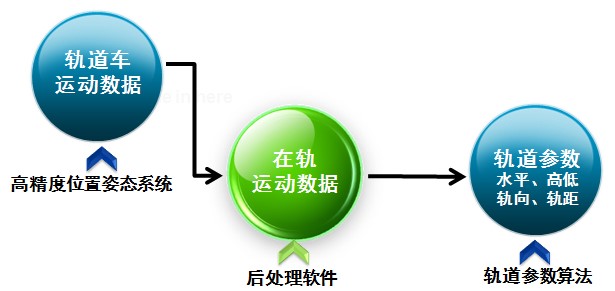
5. 北斗/惯性轨检车工作流程
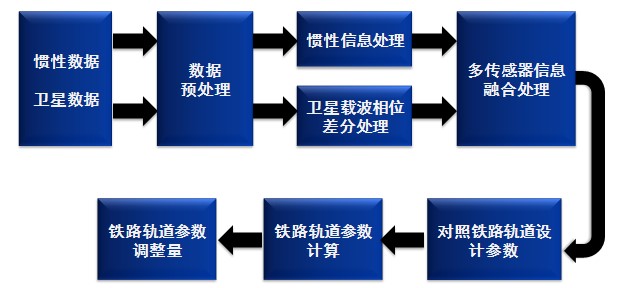
6. 对比测试结果
以光学轨检车为基准,对惯性轨检车检测做了大量测试,以下以三组现场实际实验示例:
|
组别 |
水平误差(σ) |
高低误差 -短波 |
轨向误差 -短波 |
高低误差-长波 |
轨向误差-长波 |
|
第一组(500m) |
0.149 (mm) |
0.614 (mm) |
0.428 (mm) |
2.561 (mm) |
0.882(mm) |
|
第二组(500m) |
0.1298 (mm) |
0.581 (mm) |
0.461 (mm) |
1.499 (mm) |
0.939(mm) |
|
第三组(500m) |
0.133 (mm) |
0.932(mm) |
0.435 (mm) |
2.734 (mm) |
1.946mm) |
结论:惯性轨道检测车短波的水平、高低、轨向检测精度优于1mm,长波高低、轨向检测精度优于3mm。